Ändra språk :
Programvaran igus Robot Control
Programmera, simulera och styra robotar licensfritt
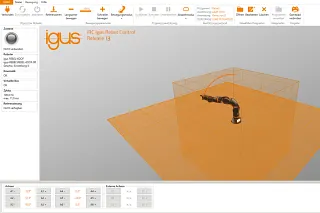
Programvaran igus Robot Control möjliggör enkel och intuitiv programmering och styrning av robotar, vilket gör det lätt att komma igång med automation. Tack vare den modulära strukturen kan olika robotkinematiker styras, t.ex. deltarobotar, portalrobotar och fleraxliga ledrobotar. Programvaran kan användas för att simulera robotens individuella rörelser på 3D-ytan - roboten behöver inte vara ansluten för detta steg.
På den här sidan hittar du följande
Kostnadsfri robotprogramvara
Programmeringsexempel på olika applikationer med robotprogramvaran
- Enkel anslutning mellan robot och styrenhet
- Intuitiv användning med 3D-gränssnitt och digital tvilling möjliggör direkt utförande och kontroll av rörelsesekvenser
- Konfiguration av kameragränssnitt möjligt direkt via styrenhet och programvara
- Programmering av delta-, gantry-, SCARA- och ledarmrobotar
- Programvaran möjliggör riskfri testning redan före köpet
Systemkrav: PC med
- PC med operativsystemet Windows 10
- Kommunikation via Ethernet eller WLAN
- 500 MB ledigt minne
Exempel på program, wiki och utbildningskurser



Gränssnitt
PLC-gränssnitt
PLC-gränssnittet (PLC = Programmable Logic Controller) gör det möjligt att utföra grundläggande funktioner och signalera tillstånd med hjälp av digitala in- och utgångar. Förutom styrning via PLC möjliggör detta gränssnitt även manövrering via hårdvaruknappar.
Digitala in- och utgångar
Digitala ingångar eller globala signaler kan användas för att ladda och starta robotprogram och skicka griparkommandon. Detta är till exempel användbart om ett program ska väljas från ett fördefinierat urval via knappar eller CRI-GSig-instruktionen.
Modbus TCP/IP
Modbus TCP-gränssnittet kan t.ex. användas för att skicka PLC-data och instruktioner till robotstyrningen och för att ta emot statusinformation.
CRI-gränssnitt
CRI-gränssnittet gör det möjligt att skicka komplexa instruktioner och hämta information och inställningar via Ethernet-gränssnittet med TCP/IP. igus Robot Control använder detta gränssnitt för att ansluta till robotar med en integrerad styrenhet eller andra instanser av styrenheter.
Kameragränssnitt
Kameragränssnittet gör det möjligt att använda objektigenkänning och videokameror. Objektigenkänningskameror identifierar objektens position och klass och överför dem till styrenheten, eventuellt med en videobild. Styrenheten beräknar positioner i robotens koordinatsystem utifrån kamerans objektpositioner. Rena videokameror ger bara bilder och kan därför bara användas för att övervaka arbetsområdet, men inte för objektigenkänning.
Moln
Molngränssnittet gör att roboten kan övervakas via RobotDimension. När roboten har aktiverats och loggat in skickar den grundläggande statusinformation och kamerabilder till onlinetjänsten. Användare kan lista sina robotar på webbplatsen och hämta informationen.
ROS, Matlab, LabView m.m.
Integrera robotarna i din ROS-miljö. Dokumentation och paket för hårdvarukommunikation, Teleop och moveI
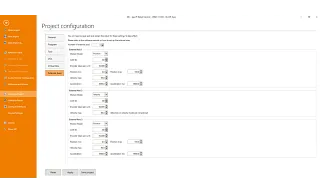
Projektkonfiguration
Grepp
Det monterade verktyget kan specificeras här. Om verktyget byts ut måste projektet laddas om eller det integrerade styrsystemet startas om. Nya verktyg kan definieras som en konfigurationsfil i katalogen "Data/Tools"
Virtuell låda
Robotarmens rörelseomfång begränsas av inställningarna i den virtuella boxen. Denna funktion bidrar till att förhindra mekaniska skador och, beroende på tillämpning, förenklar programmeringen. Om ett program körs som bryter mot den virtuella boxen stoppas det med ett felmeddelande.
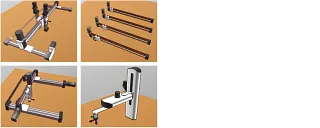
Externa axlar
Robotstyrningen har stöd för upp till 3 extra axlar (i iRC även kallade "extern axel" ). Dessa kan installeras i enlighet med robotaxlarna och konfigureras via konfigurationsområdet i iRC.

Program
Här kan du definiera robot- och logikprogram, förflyttningshastighet (i procent av maxhastigheten), uppspelningsläge och reaktion på programfel.
Speciell kinematik
Robotstyrningen kan skräddarsys för din robot med en digital tvilling. Vi konfigurerar den inversa kinematiken så att den passar din projektverksamhet.
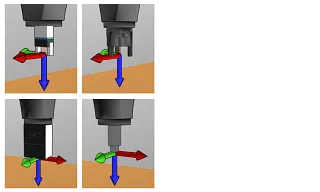
Programmering
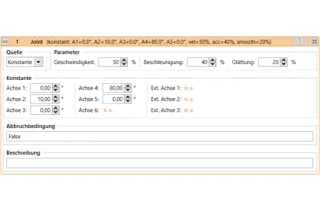
Axelförflyttningar
Joint-kommandot flyttar roboten till en absolut målposition som anges i axelkoordinater (t.ex. axelvinkel eller position för en linjär axel). Den resulterande rörelsen för TCP är vanligtvis en kurva och inte en rak linje.
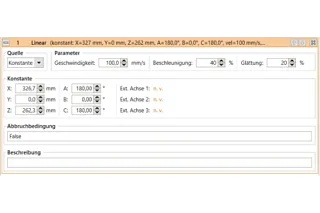
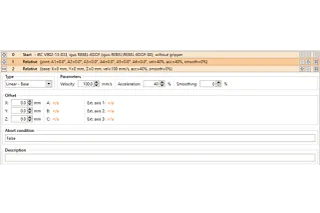
Linjär förflyttning
Linear-kommandot flyttar roboten till en absolut målposition som anges i kartesiska koordinater. Den resulterande förflyttningen av TCP följer en rak linje.
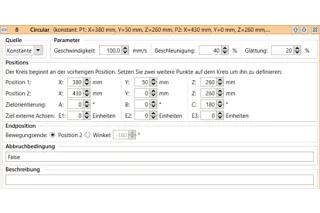
Cirkulära rörelser
Instruktionen "Circular motion" möjliggör rörelser längs en helt eller delvis cirkulär bana. Den är kompatibel med linjära rörelser så att övergången från och till linjära rörelser kan göras mjukare.
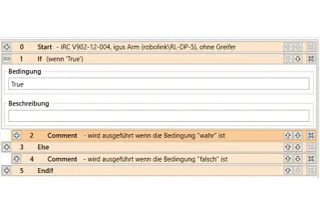
Villkor
Villkor kan användas i if-then-else-kommandon, loopar och som annulleringsvillkor i rörelsekommandon. Villkoren kan vara kombinationer av digitala ingångar, globala signaler, booleska operationer och jämförelser.
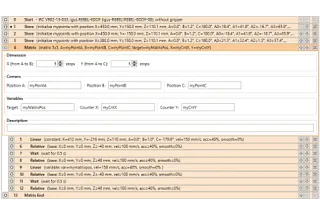
Beräkning av matris
Rutnätsinstruktionerna beräknar positioner som är inriktade på ett rutnät, t.ex. som grip- eller insättningspositioner för palleteringsuppgifter.
Relativ
Med kommandot Relative kan du flytta roboten i förhållande till dess aktuella position. Det kan nås via menyalternativen på "Action" → "Relative movement".

Underprogram
Underprogram kan hämtas med underkommandot. Sökvägen till underprogrammets fil anges under "Filnamn". Den är relativ till undermappen "Programs" i iRC-mappen "Data".
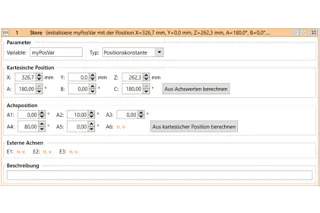
Variabler och variabelåtkomst
Det finns stöd för två typer av variabler i program för igus Robot Control och TinyCtrl:
- Talvariabler: Dessa kan användas för att lagra heltal eller flyttal.
- Positionsvariabler: Dessa kan användas för att lagra kartesiska positioner och ledpositioner. Om en sådan variabel tolkas som en kartesisk position eller en ledposition beror på sammanhanget.
Ladda ner robotprogramvara

Den licensfria programvaran igus Robot Control är integrerad i styrsystemet och använder därför ett standardiserat driftskoncept och enhetliga kommunikationstjänster för många komponenter i ett system. Detta innebär mindre arbete med projektplanering och snabbare driftsättning.
- Testa all igus-kinematik i förväg i programvaran
- Med förprogrammerade projekt för alla igus-robotar, enkelaxlar och AGV:er
- Intuitivt 3D-gränssnitt med simulering av roboten
Rådgivning
Jag svarar gärna på dina frågor personligen

Leverans och rådgivning
Personligen::
Måndag – fredag: 8:00 – 18:00